从本网《专栏》转来的一个文章=========================================
概述
拉铲,是一种用于土石方工程或露天采矿的重型设备。
较小的拉铲可用于诸如公路建设、港口工程等,大型拉铲则常在露天煤矿、油砂矿中用于覆层剥离。动辄2000公吨的体重,使拉铲位列地表最大机械的之列,家族最大者更是超过了13000吨。
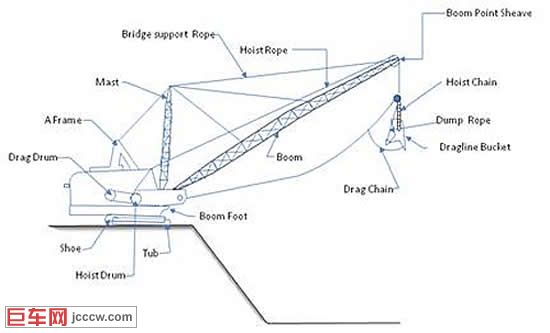
拉铲工作装置系统是一个由钢丝绳悬于吊臂的铲斗组成。铲斗由钢丝绳和铁链进行操纵,由大型柴油机或电机带动的提升钢丝绳,对铲斗及提升连接装置进行支撑,拖曳钢丝绳用于水平拉动铲斗。通过灵活的提升及拉动铲斗可以完成不同的动作。
拉铲结构示意
历史
1904年,John W. Page(Page & Schnable承包公司的合作者)发明了拉铲,用于开掘芝加哥运河。1912年Page发现制造拉铲比起承包来更赚钱,于是他成立了Page工程公司来专门生产拉铲。1923年,Page生产出了比较粗陋的首台步进式拉铲。1924年Page开发出了专用于拉铲的柴油发动机,还发明了拱形铲斗——此设计到今天还有其它公司在广泛使用,上世纪60年代又首创了无拱铲斗设计。由于行走机构严重落后于Monighan,Page在1935年将行走机构级为偏心传动,这种改进后为椭圆运动的机构一直使用到1988年。1954年Page 推出了现代化的700系列,该公司的最大型号是1983年交付给阿尔伯塔欣顿Obed矿的757型,此机器铲斗容量57立方米,吊臂长度91米,运行重量4500吨。1988年,P&H将Page工程公司收购。
Page 757
1907年,因一份来自当地John W. Page用于拉铲的提升机构订单,使芝加哥的Monighan机械厂对制造拉铲产生了兴趣,1908年,Monighan将名字改为Monighan机器公司。1913年,Monighan的一名工程师Oscar Martinson发明了首个用于拉铲的行走机构,此装置名为“Martinson牵引器”,安装于一台Monighan的拉铲上——首台步进式拉铲出现了——相比其它拉铲有巨大优势,公司由此得到较好发展。1925年,公司对凸轮机构进行了改进,去掉了行走靴的牵引链而使凸轮运行于椭圆形轨道内,使得行走靴的运动轨迹成为精准的椭圆形。首台使用此机构的是一台1926年的3-W机型,这个机构相当受欢迎,以至于使Monighan成为了拉铲行业的一个术语。上世纪30年代初期,经批准B-E公司开始购买Monighan的股份,Bucyrus购买了控股权将公司名字变为Bucyrus-Monighan,直到1946年正式兼并Monighan。
1935年某大坝修建中一台Monighan拉铲
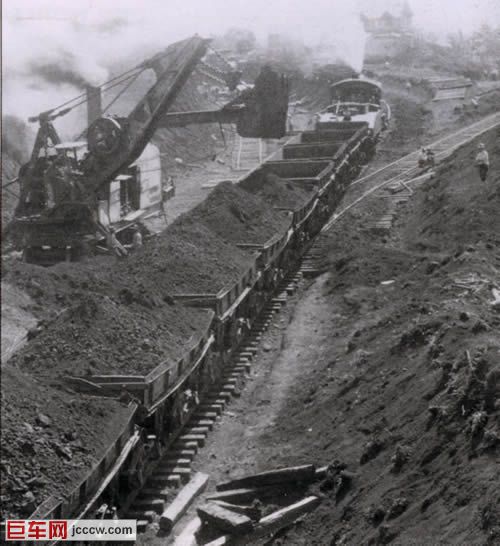
当年巴拿马运河开凿时使用的蒸汽铲,约有三分之二是由Bucyrus提供的。在收购了Heyworth-Newman拉斗挖掘机的制造权之后,B-E从1910年开始进入拉铲市场,1911年推出的“Class 14”是最初的履带式拉铲。1912年在Bucyrus的帮助下,使用于矿山的巨型剥离铲和拉铲开始用电力作为动力源。1946年兼并Monighan之后,Bucyrus开始利用其行走机构制造更大的机器——如重达800短吨、斗容11.5方的650-B。该公司的最大号拉铲是1969年为俄亥俄州煤炭公司制造的Big Muskie(官方编号BE-4250W),这个巨人臂长94米,斗容168方,体重14000短吨。在经历了上世纪60-70年代的繁荣之后,拉铲市场开始急速萎缩。P&H对Page的收购和Bucyrus对Marion的收购,将全球拉铲供应商的数量削去一半。如今的P&H及Bucyrus(已又被CAT收购)是目前全球仅存的两家拉铲生产商。
巴拿马运河建设时
1914年,Harnischfeger公司(即现在的P&H,创立于1884年)推出了世界首台使用汽油发动机作动力的拉铲。一家意大利制造商Fiorentin在Bucyrus授权下,从1919年开始生产拉铲。1988年Page被Harnischfeger公司收购,产品线有电铲、拉铲和起重机。除Bucyrus外,P&H是唯一存活下来的巨型拉铲生产商。
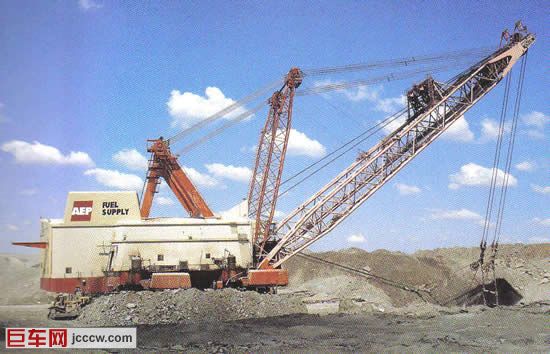
成立于1880年的Marion蒸汽铲挖泥船公司,向巴拿马运河的开凿工程提供了约三分之一数量的蒸汽铲。Marion一直在生产大型动力铲,直至1965年巨兽“The Captain”(官方型号6360)剥离电铲的出现,6360的斗容为138方,重量15000短吨。1939年Marion生产出了公司的第一台使用简单大臂结构的步进式拉铲。1946年公司改名为Marion动力铲公司,该公司生产过的最大型拉铲是1973年卖给Amax 煤炭公司的8950型——斗容115立方米,臂长94米,运行重量7300短吨。1997年Marion被Bucyrus收购,而后者也在2011年入主工程巨头美国Caterpillar公司。
Amax 煤炭公司的8950型
运行
一个典型的挖掘循环,铲斗定位于需要挖掘物料的上方,铲斗在重力作用下切入物料,而后拉斗绳水平拉动铲斗使物料充满,接着由提升绳提起铲斗,再就是进行回转卸料,之后拖曳绳放松使铲斗倾斜向下。
拉铲还可通过扬起臂架、接着释放拖曳绳上的离合器将铲斗甩出,这时的铲斗如钟摆一般,在向外摆超过垂直位置时,提升绳释放将铲斗掷出。在小型拉铲上,一个熟练的操作人员能将铲斗甩出距离达到大臂长度的一半,而在大型机器上这个距离会小的多。拉铲在运行中有多种不同的切削顺序,主要根据实际情况和需要而定。
露天采矿中使用的大型拉铲系统的费用约为5千万-1亿美元,常用铲斗的容量范围为30-60立方米,而超大型的可达168立方米,每一循环可移除数百吨物料。
许多的采矿用拉铲不同于使用柴油动力的其它矿用设备,它们的动力消耗巨大,只能直接联接6.6-22kV的高压电网获得能量,一个典型的斗容55立方米拉铲,在常规运行中耗电量达到6MW。因此便有了许多拉铲造成停电的故事(也可能是杜撰),例如有这样一个流传了很长时间的——说是在上世纪70年代,如果Peak Downs矿(在澳大利亚昆士兰中部)上的七台拉铲同时运行,那么会造成整个北昆士兰停电。即使在今天,如果它们停机后要重新启动的话也只能一个一个地来,因为耗电量太过惊人。
除小型的之外,拉铲都是步进式的底盘,因为用履带会使地面压强过大且履带难于承受如此巨大的重量,因为“步履蹒跚”所以拉铲行走速度极为缓慢,如要进行中距离(30-100公里)移动,则需要特殊的运载车的帮助;如距离再远些,一般就要进行拆解运输了。但拉铲能在一个工作地点的很大区域内使用,所以也不需要像小型设备那样经常换地方。
局限性 最主要局限性就是其大臂扬起高度及臂长,这限制了拉铲的卸料位置。另一个主要限制是挖掘深度,主要受限于它使用的缆绳的长度。因其自身固有结构,拉铲十分适于挖掘低于停机面的物料,虽然能够挖掘高于自身位置的物料,但并不适于进行物料的堆放(而绳铲或轮式装载机在这方面做得比较好)。
尽管有这些不足并且还需要高昂的费用,但拉铲在许多矿山还是很受欢迎,因为它们稳定可靠、且覆层移除成本极低。
著名机型
首先是著名的Big Muskie,它服役时间为1969-1991年,1999年拆解,关于它的介绍,请点击查看。
著名的Big Muskie
英国公司Ransomes & Rapier也曾生产过一些大型挖掘机(1400-1800短吨),其中包括上世纪60年代时欧洲最大的。这些机器通过内燃机带动发电机来为机器提供动力,其中有一个名为“SUNDEW”,1957-1974在一采石场使用,之后用9周时间行走了13英里来到Corby开始新的工作地。
在Corby的SUNDEW
在液压挖掘机广泛使用之前,小型拉铲也曾大行其道,只是现在除了在极个别河道及采砾坑工程中,很难再看到它们了。这些小型设备一般是带离合器的机械驱动。如Ruston & Bucyrus,曾生产过很受欢迎的10RB,用于小型建设及排水工程,现在还能在一引起地方看到它们。电力驱动系统仅用于大型采矿机器,现在的好多机器使用柴油机——液压驱动,因为它们在一个地方呆的时间都不会很长,不值得去设置专门的变电站和供电电缆。
10RB小型拉铲
技术进展
拉铲不同于其它种类土石方机械,其设计与控制系统几乎一百年都没有发生变化。但在过去几年中倒还是出现了一些进展。
自动化
澳大利亚联邦科学与工业研究组织有一项拉铲自动化的长期研究,自动化拉铲在计算机的控制下已经移除了超过25万吨的覆层。
拉铲自动化
模拟软件
因为拉铲通常十分巨大、复杂及价格昂贵,所以培训操作人员就成了一个棘手的问题。针对此问题 Flight simulators开发出了仿真模拟软件,它能帮助新手机组人员学会如何控制这台机器。
UDD
UDD技术的发明或许对拉铲作出了近一个世纪以来的根本改变,它使用了不同的铲斗控制方式,由三条(一条拉斗,两条提升,传统结构是两条)钢丝绳对铲斗进行控制,对铲斗的控制能力大大提高。UDD机器生产率通常比传统机型要高,但由此产生的机械问题也随之增加。在采矿行业对此技术还有不少争议——其改进是否足以弥补其成本。
UDD的铲斗控制
|
|











.jpg")



